
ST言語にはラダー言語同様にFOR~NEXTがあります。
ラダー言語のFOR~NEXTは独特ですが、ST言語のFOR~NEXTはC言語に近い型となっています。
ST言語を使用するメリットとして3つ挙げられます。
1.可読性があがる
2.余計な演算用デバイスが減る
3.一つ一つ演算するのではなく、数式のようにまとめて演算できる
ST言語のメリットを紹介したので次に、ST言語のFOR~NEXTを説明していきます。
ST言語 FOR~NEXT説明1

ST言語 FOR~NEXT説明2

Point.宣言の手順は、①初期化 ②範囲指定 ③増加分の指定
ラダーとST言語のFOR~NEXTの違いは強制宣言でしょう。
ラダーはFOR~NEXTを指定された回数繰り返すのにたいし、ST言語のFOR~NEXTは最初に初期化と範囲と増加分を指定します。
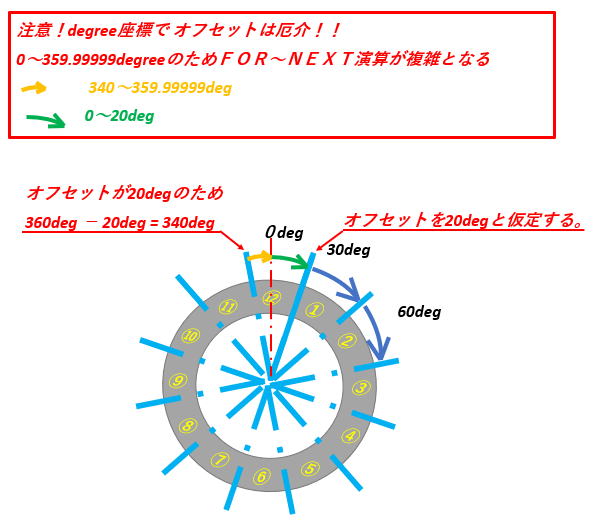
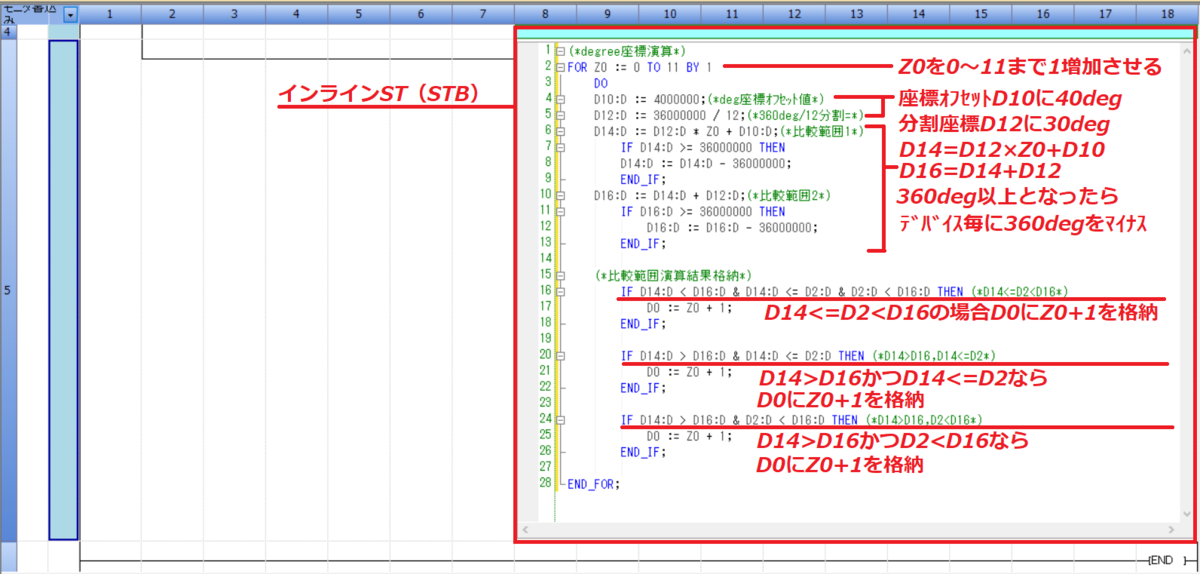
FOR~NEXTで比較するのはサーボモータdegree座標演算プログラムにしました。
若干複雑な演算式もあるためこちらが良いと判断しました。
下記が過去記事と参考プログラムです。
サーボモータdegree座標検索演算方法
www.niwakafa.com
サーボモータdegree座標検索
サーボモータdegree座標検索演算方法プログラム1
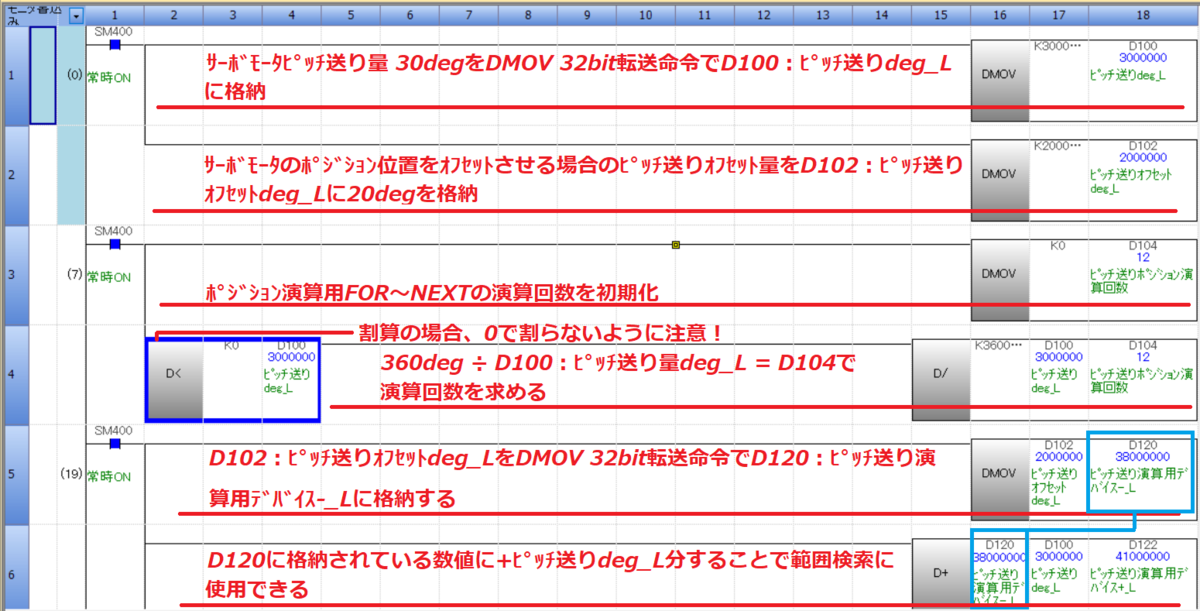
サーボモータdegree座標検索演算方法プログラム2
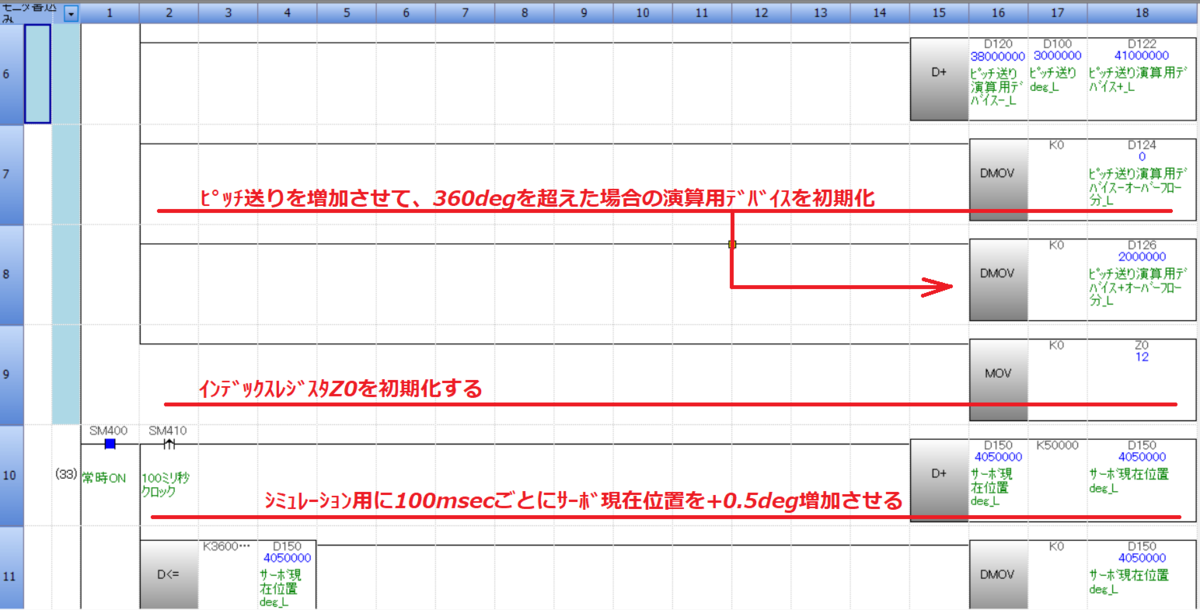
サーボモータdegree座標検索演算方法プログラム3

サーボモータdegree座標検索演算方法プログラム4

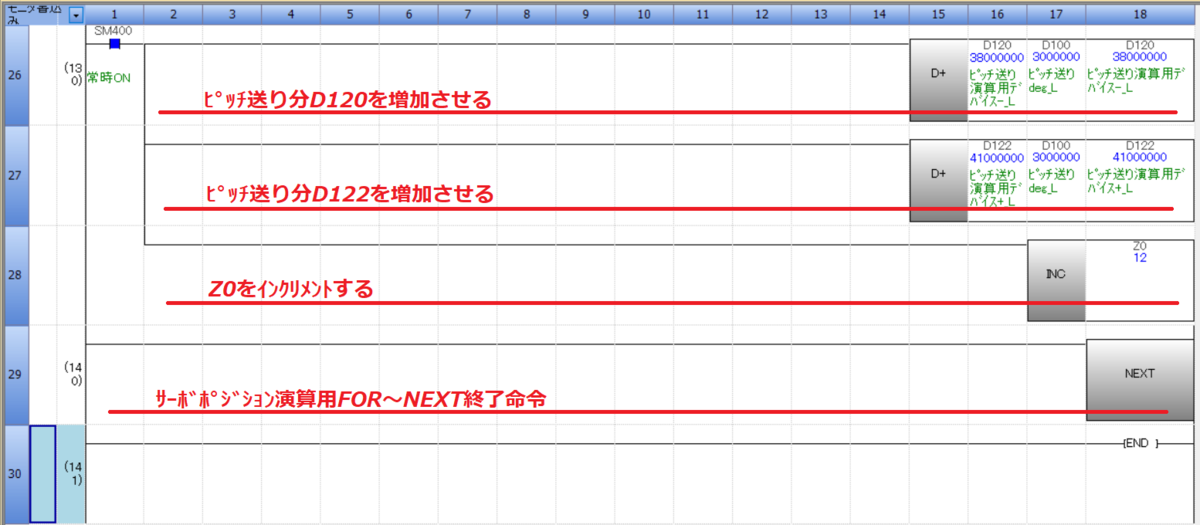
サーボモータdegree座標検索演算方法プログラム5
それでは実際にST言語で記述するとどのようになるか説明していきます。
広告
GX Works3 ST言語 FOR~NEXT
ST言語でのFOR~NEXTを記述していきます。
インラインST挿入 STB

ST言語 データ型式指定 ダブルワードD0:D
ST言語 データ型式ダブルワード指定
Point.ダブルワードを指定する場合は:Dと指定デバイスのあとに付け加える
参考プログラム
FOR~NEXTプログラム1
FOR~NEXTプログラム2
Point.ラダープログラムと比較するとST言語の方が見やすくなるが、ステップ数は多くなってしまう
まとめ
・宣言の手順は①初期化 ②範囲指定 ③増加分の指定
・ダブルワードの型は:D
・可読性はST言語が良い