モーションCPUが立ち上がったか確認する際には最初JOG操作を行うかと思います。
いきなり位置決め指令を行うソフト屋さんがいるのであれば相当な自信家か何度も実績がある機械システムかと思います。
通信確認やサーボの状態を正確に把握するためにも、まずはJOG動作を行い、サーボモータの状態をサーボアンプを通して確認する必要があります。
サーボモータを取り扱うためには必須の技術でありながら、見落としがちなJOG操作方法。
JOG操作でインターロックを取る方もいらっしゃいますが、これは干渉物と干渉した際にインターロックがきき、復旧動作ができないという事例を私は何度も聞いていますので、私はJOG操作にインターロックを取らないようにしています。
インターロックを取ったとしても解除できるようにソフト上でインターロックを解除できるように工夫しています。
このようにJOG操作には様々な考え方がありますが、今回はモーションSFCプログラムのJOG始動指令プログラムについて紹介します。
!注意
自分のシステム構成がR標準配置なのか、Q互換配置なのか確認してから今回の記事を読むことをお勧めします。
www.niwakafa.com
www.niwakafa.com
広告
モーションSFCプログラム JOG操作方法
モーションSFCプログラム JOG始動指令

Point.軸1 正転JOG:M34482、逆転JOG:M34483 【R標準配置】
iQ-Rシリーズ標準配置とQシリーズ互換配置でJOG始動指令ビットが異なるのですが、iQ-Rシリーズ標準配置では軸1 正転JOG:M34482、逆転JOG:M34483となります。
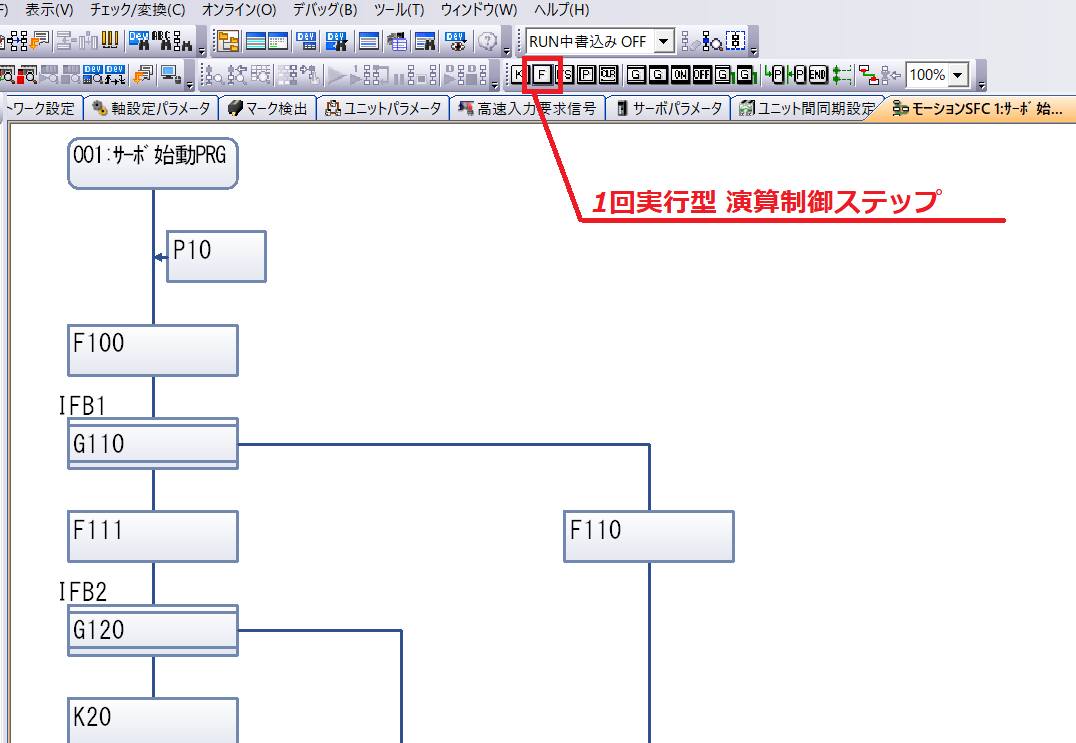
1回実行型演算制御ステップの参考プログラムを表示します。
モーションSFC JOG操作参考プログラム

Point.OUT命令でJOG始動指令ビットのON、OFFを管理
JOG始動指令ビットはOUT命令でON、OFFを管理するようにします。
ただし、これはモーションSFCプログラムをWAIT(待ち)がないようにする工夫が必要ですので参考の過去記事を見てプログラムを作成しましょう。
www.niwakafa.com
www.niwakafa.com
そして、注目すべきはJOG始動指令を行うためにはJOG速度設定を行う必要があるということです。
まずは1回実行型演算制御ステップの作成方法を紹介します。
モーションSFC 1回実行型演算制御ステップ作成方法
モーションSFC 1回実行型演算制御ステップ作成方法動画説明

Point.最終的には自分で演算プログラムを入力する
今回のプログラムは私が全て作成し終わっている状態ですので、簡単に思えるかもしれませんが、実際は自分で入力する必要がありますので、資料などを自分で用意しましょう。
モーションSFC JOG速度設定レジスタ【R標準配置方式】

Point.R標準配置とQ互換配置ではデバイスが異なる
R標準配置とQ互換配置では設定するデータレジスタが異なりますので、必ず確認してからデータを格納するようにしましょう。
モーションSFC JOG速度設定レジスタ【R・Q配置】

Point.それぞれのシステムR・Qの配置を確認しデータデバイスを確認する
まとめ
・R標準配置なら、軸1 正転JOG:M34482、逆転JOG:M34483
・JOG始動指令を行うためにはJOG速度設定を行う必要がある
・R・Qの配置をそれぞれのシステムで必ず把握する
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com