
三菱電機のPLCにはモーションCPUというサーボモータ制御を専門とするCPUユニットがあります。
三菱電機のシンプルモーションユニットにてサーボモータ制御を行うことも可能ですが、高い応答性やPLCのスキャンタイムの影響を受けないようにするためにはモーションCPUを使うことが一番良いでしょう。
モーションCPUはMT Developer2でプログラムを記述し、プログラム言語はモーションSFCで構築します。
モーションSFCはSFC言語のように工程歩進プログラムとして記述するため、メリットとしては工程の進捗ごとに記述すればその通りにサーボモータを制御することができるのですが、ダンマリ停止になりやすいというデメリットがあります。
SFC言語をラダーと同様に記述すればダンマリ停止になることを防ぐことができるため、シングルタスク処理をするプログラムに対しては仮想的にマルチタスクのように処理させるプログラムを作成する努力をしましょう。
今回はモーションCPU R64MTCPUを使用してGX Works3のシステムシミュレーションによる連携方法を紹介します。
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
広告
モーションCPU R64MTCPU GX Works3を用いたシステムシミュレーション方法
GX Works3 デバッグ

Point.デバッグ ➡ シミュレーション ➡ システムシミュレーション ➡ 起動
まずはGX Works3のシステムシミュレーションを起動します。
システムシミュレーションを起動することによって、様々なサーボコントローラユニットとのシミュレーションを行うことが可能となります。
GX Works3 システム追加
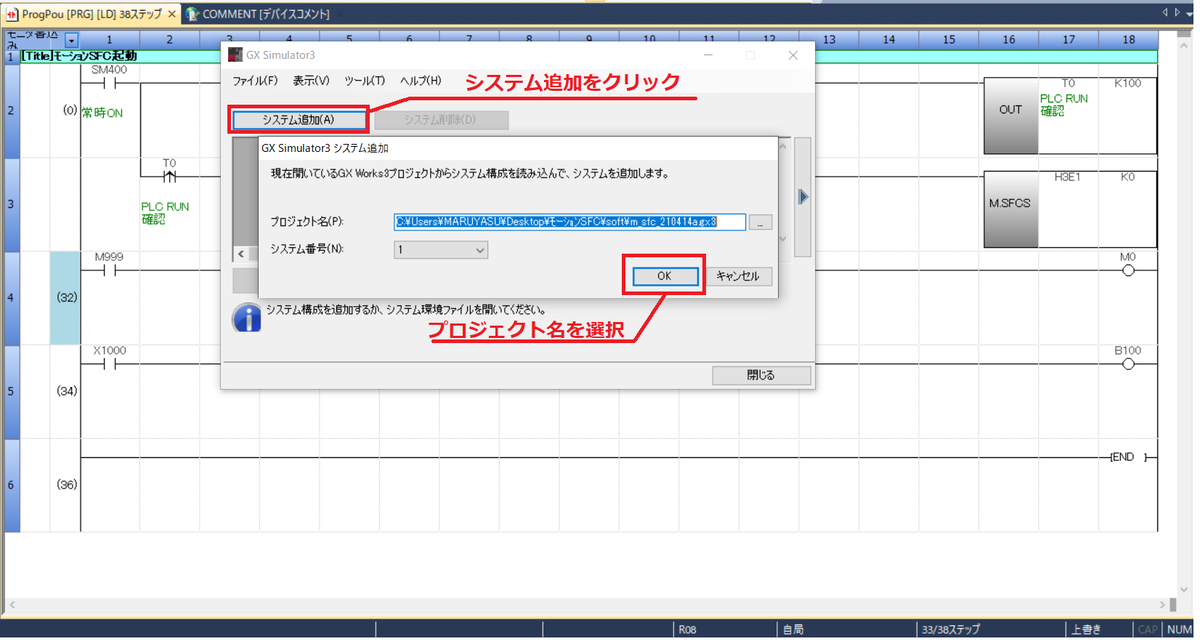
Point.システムシミュレーションを行うためにシステムを追加する
GX Works3 モーションCPU R64MTCPU
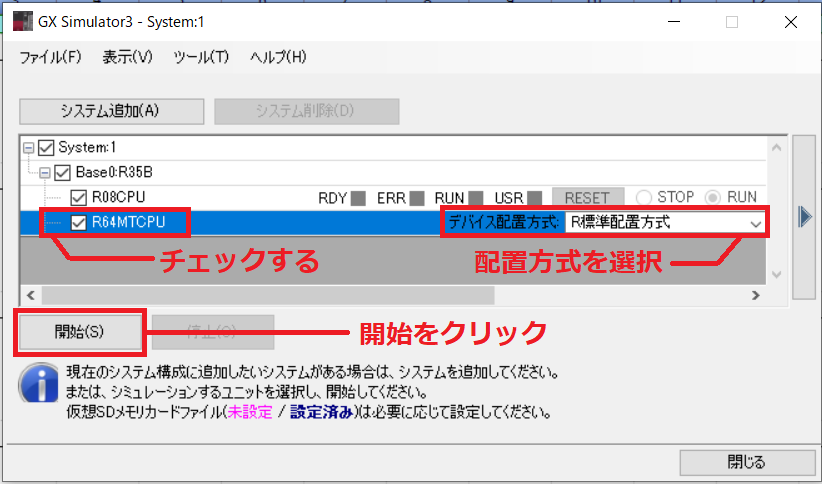
Point.システムシミュレーションにモーションCPU R64MTCPUを追加する
システムシミュレーションにモーションCPU R64MTCPUを追加するためにチェックを入れ、デバイス配置方式をQシリーズかiQ-Rシリーズか設定します。
チェックと設定が完了したら開始をクリックします。
GX Works3 接続先設定

Point.デバッグ ➡ シミュレーション ➡ システムシミュレーション ➡ 接続先設定
モーションCPUを起動するためには、CPUとの接続先を明確化する必要がありますので、ここで接続先を設定します。
GX Works3 接続先設定確認

Point.CPUとモーションCPUが紐づけされていれば接続をクリック
GX Works3 シーケンサへの書込み

Point.CPUのプログラムを書き込むことで仮想CPUがプログラムを記憶する
仮想CPUには現状プログラムがなく起動しても実行するプログラムがない状況です。
そこでシーケンサへの書込みでプログラムとパラメータを転送することによって、仮想CPUが動作することができます。
GX Works3 パラメータ+プログラム ➡ 実行

Point.仮想CPUにパラメータ + プログラムを書込む
MT Developer2 接続先

Point.オンライン ➡ 接続先設定をクリック
モーションCPUも仮想CPUにパラメータやプログラムを書き込む必要があります。
そのため、MT Developer2のシミュレータを起動します。
MT Developer2 接続シミュレータ設定

Point.接続先シミュレータをシステムシミュレーション(GX Works3)と合わせる
ここの接続先シミュレータとシステムシミュレーション(GX Works3)が合わないと、モーションCPUがうまくRUNしないので注意が必要です。
MT Developer2 モーションへ書込み

Point.モーションCPUへ書き込む
MT Developer2 パラメータ + プログラム書き込み

Point.パラメータ + プログラムをモーションCPUへ書き込み
GX Works3・MT Developer2 RUN

Point.GX Works3はリセット+RUN、MT Developer2はRUN
正常に設定が完了すると、仮想CPUがRUNします。
この状態なら机上でのデバッグが可能となり、試運転前にプログラム修正を行うことができます。
GX Works2ではできなかったといいますか、うまく使えばできましたが、このように正規でシミュレーションできる機能があるGX Works3はありがたいです。
まとめ
・モーションCPUはGX Works3のシステムシミュレーションでシミュレーション可能
・仮想CPUにプログラムやパラメータを書き込む
・GX Works3とMT Developer2でRUNをチェック