今回からラダープログラムを絡めたサーボプレス、CORETEC(コアテック)の話を進めていきます。
正直、特殊な機器、サーボプレスやロボット、RFIDなどは扱いが最初分からず苦労しますよね。
相手の挙動、習性がわかると、一気に扱いが簡単になるので、本当に慣れるしかないのですが。
皆さんも私同様、初めての機器とのやり取りは不安になると思います。
なので、特殊な機器の情報は隠さず、皆さんと情報共有していこうと私は考えております。
試運転時に機器が立ち上がらない苦しさは、私が一番理解しているつもりです笑
今回はCORETEC(コアテック)のサーボプレス サーボON、JOG〜原点復帰について紹介したいと思います。
CORETEC(コアテック) サーボプレス ラダープログラム
サーボオン / アラーム解除
タイムチャート


プログラム例

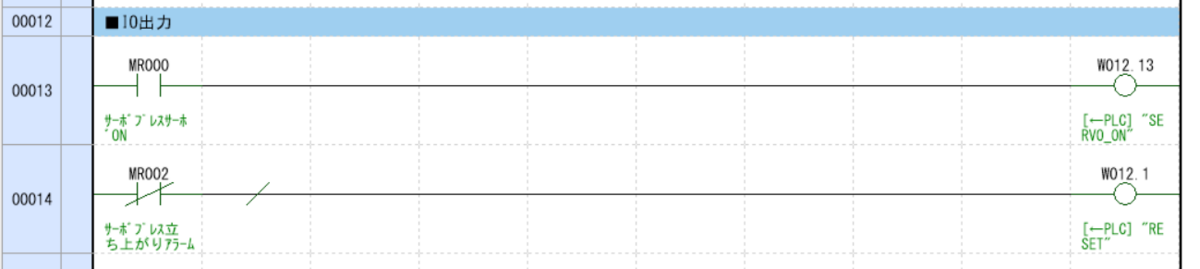
■サーボオン方法
・サーボプレスより、READY_RUNがONしていることを確認する。
・PLCからSERVO_ONを出力する。
上記でサーボプレスはサーボオンします。
■アラーム解除
・PLCからRESETを出力する。
注意事項として、電源投入して非常停止などをするとサーボプレス側が異常を記憶している場合があります。
電源投入した際にアラーム解除のシーケンスを組んでおいた方が無難かもしれないです。
動作許可

■動作許可
サーボオンなどを確認し、サーボプレスが動作可能状態になったかどうか、判断するプログラム例になります。
原点復帰
タイムチャート

プログラム例




■原点復帰
・IN ORIGINを出力する
・IN ORIGINを出力後、一定時間(0.05~0.2秒?)後にIN RUNを出力する
・OUT ORIGIN_ENDが入力されたら原点復帰完了
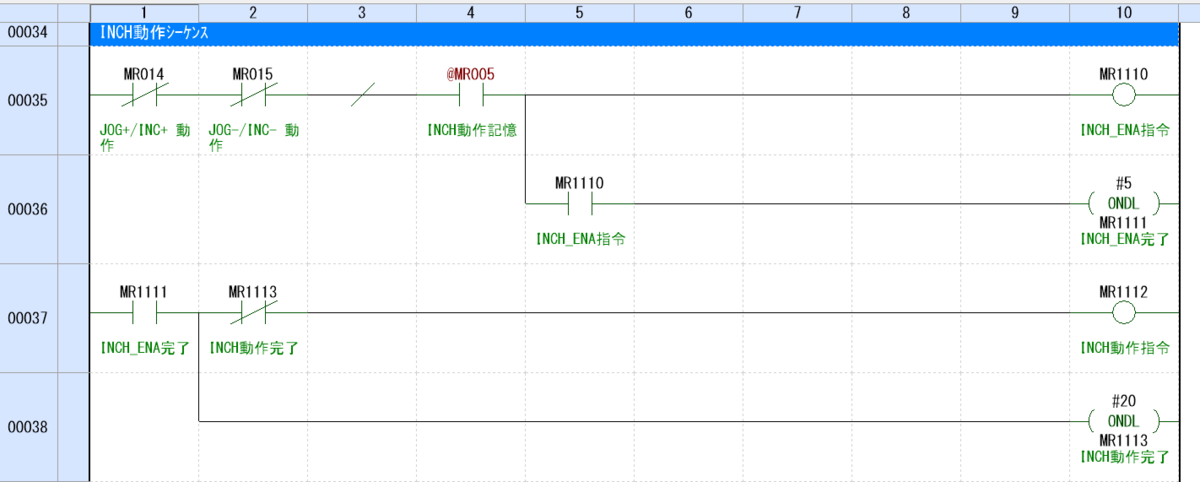
JOG運転 / インチング運転
タイムチャート


プログラム例
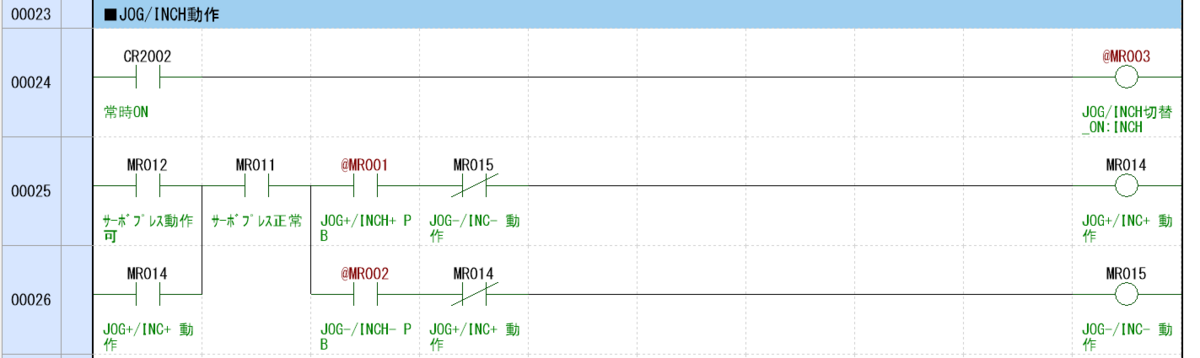

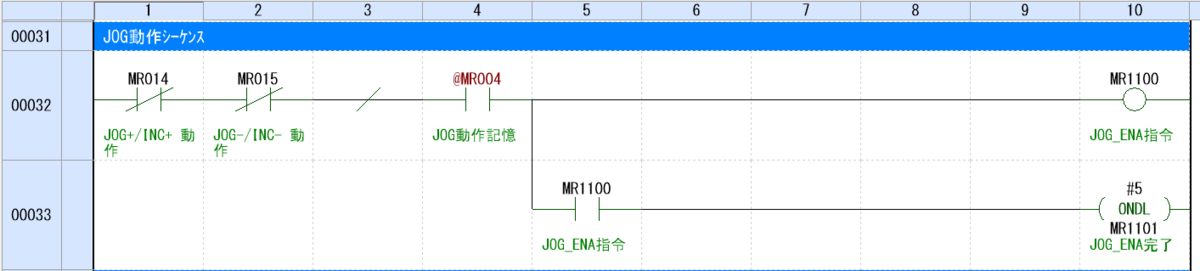

■JOG運転
・IN JOG_ENAを出力する
・IN JOG_INCH+、もしくはIN JOG_INCH-を出力する
・JOG動作中はOUT RUNが入力される
■インチング運転
・IN INCH_ENAを出力する
※JOG運転はIN JOG_ENAで、お互いにONしないように注意する
・IN JOG_INCH+、もしくはIN JOG_INCH-を出力する
※0.1秒以上は出力する
・インチング動作中はほぼ検出できない。
まとめ
・サーボプレスの参考ラダープログラムを書いてみました・新規でプログラムを書き直しているため、動作保証できませんが、参考にはなると思います。