
GX Works2を用いてIB-C02BをCC-Link通信制御した際の参考プログラムを公開します。
実績はありますが、あくまでも参考ですので注意してください。
モータローラを使用する際、CC-Link対応のIB-C02Bに関する資料は少なかったです。
機械的には省スペースでありながらコストが高いという部分と電気的には省配線でありながらプログラムが複雑化する部分があります。
それらを考慮するとあまり浸透していないのかなという印象ですが、初めて使用するかたの参考となればと思います。
今回はIB-C02BのCC-Link通信制御プログラムの参考を紹介します。
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
広告
伊東電機IB-C02B CC-Link制御プログラム
GX Works2 IB-C02B制御プログラム1
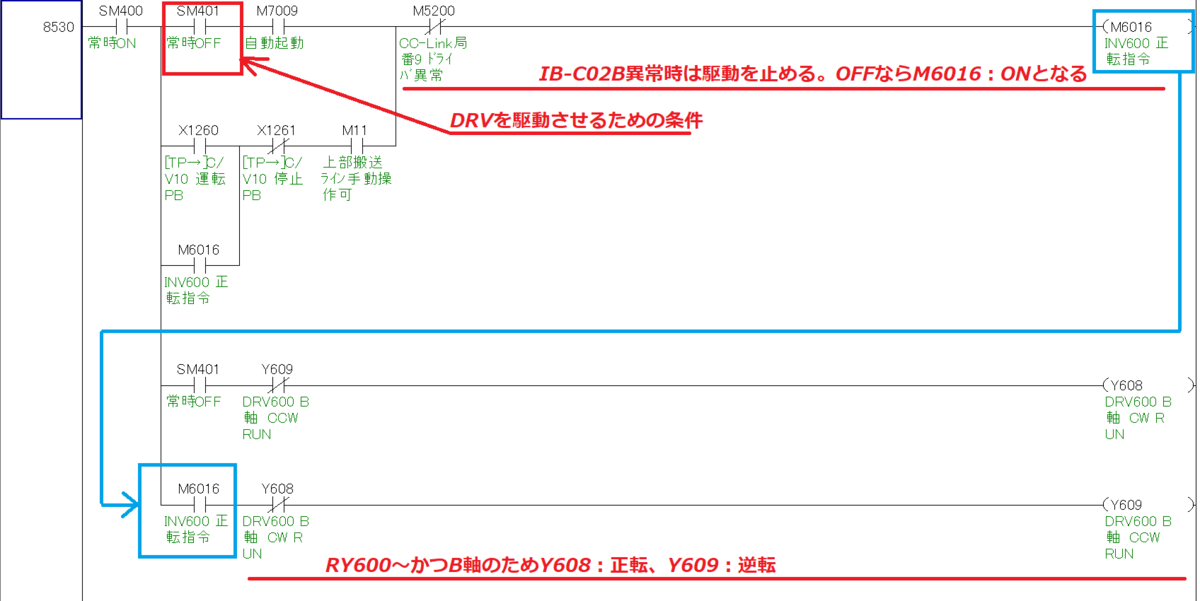
Point.リモート出力はY600~ B軸の正転/逆転=Y608/Y609
リモート出力はY600~であり、B軸を制御します。
B軸の正転はY608、逆転はY609です。
GX Works2 IB-C02B制御プログラム2

Point.D10032 = 設定速度/D10034 = 最高実測速度
D10032に設定速度を設定し、D10034に最高速度m/minを設定するようにすればプログラムを流用できます。
最終的には回転数rpmを算出するプログラムです。
GX Works2 IB-C02B制御プログラム3

Point.回転数rpmを設定するにはY619:イニシャル要求をON
回転数を設定する際はイニシャル要求をONしてください。
リセットはX619:イニシャル処理完了のONで良いでしょう。
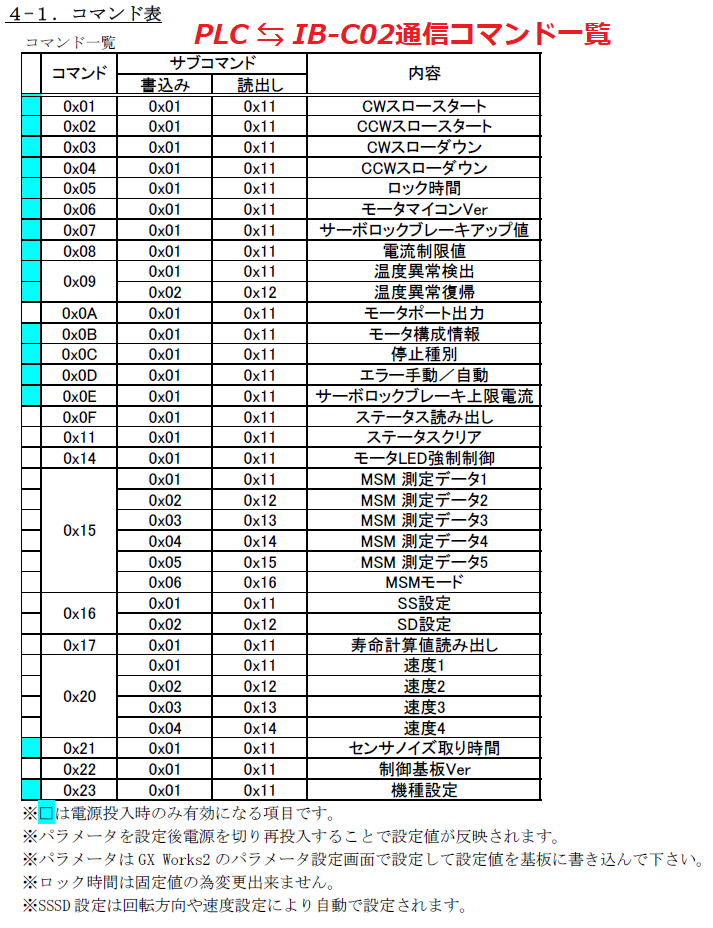
コマンドは下記表を確認してください。
コマンド一覧
GX Works2 IB-C02B制御プログラム4

Point.動作される速度No.をビットで指定
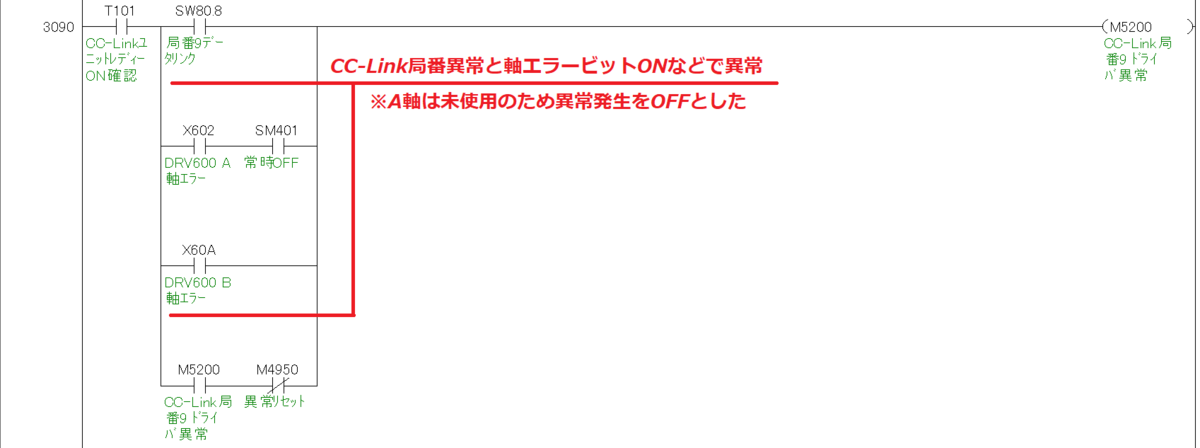
GX Works2 IB-C02B制御プログラム5

Point.M5200:異常発生時アラームコード読み出し
M5200:異常発生がONすると、アラームコードを読み出すようになっています。
GX Works2 IB-C02B制御プログラム6

Point.異常や回転数の設定がない場合、回転数を読み出し
Y619:イニシャル要求がOFFかつM5200:異常発生がOFFであれば、回転数を読み出すようになっています。
GX Works2 IB-C02B制御プログラム7
まとめ
・Y608:正転 / Y609:逆転
・Y619:イニシャル要求で回転数の設定
・エラー発生時はアラームコード、正常時は回転数を読み出す
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com