PLC(シーケンサ)でサーボモータを制御することはあるでしょうか?
PLC(シーケンサ)でサーボモータを制御する際には、PLC(シーケンサ)で直接制御することは演算周期上不可能であるため、2つ機器が必要となります。
・サーボモータにPWM(Pulse Width Modulation:パルス幅変調)を出力しサーボモータからのフィードバック信号を入力するサーボアンプMR-J4Bシリーズ
・サーボアンプへPLC(シーケンサ)からの移動・駆動指令を出力するためのシンプルモーションユニットRD77MS
PLC(シーケンサ)メーカーで様々な方式がありますが、今回はサーボアンプMR-J4Bシリーズ、シンプルモーションユニットRD77MSという制御機器構成でお話します。

上記画像のような構成イメージをして頂ける良いのですが、PLCとサーボアンプMR-J4Bの通信はシンプルモーションRD77MS、サーボモータの制御はサーボアンプMR-J4Bにて行うようになります。


上記画像を見て頂いてサーボモータを理解できたでしょうか?
まず初級者が無理かと思います。(^^;
要約しますと、
1.動作原理はステータである巻き線にPWM(Pulse Width Modulation:パルス幅変調)を出力することで、ロータである永久磁石が動く。
2.シャフトには位置を読み取るエンコーダがあり、エンコーダの位置情報からサーボアンプがPWM(Pulse Width Modulation:パルス幅変調)を調整、これをゲイン調整で最適にする必要がある。
3.エンコーダの位置情報によって現在位置がわかり、それに追従するようにサーボアンプからPWM(Pulse Width Modulation:パルス幅変調)を出力し位置を調整することができるため正確な位置で停止することが可能。
サーボモータというものを何となく理解して頂いたと思いますので、制御機器構成の話に戻ります。
制御機器構成で述べました、サーボアンプMR-J4Bにはセンサーを取り込むことができます。
当然、安全上必要なオーバーラン(リミット:これ以上動いたらぶつかる)というセンサーを取り付けることによって、サーボモータに不具合があって動作が正常にできなかった場合に停止状態とすることができます。
安全上、オーバーラン(リミット)のセンサーは駆動源(今回はサーボモータ)に近い、もしくは制御しているサーボアンプ:MR-J4Bに取り付けることが一番良いですが、制御機器構成をお話した通り、PLC(シーケンサ)側がサーボモータが現在オーバーラン(リミット)の位置にいるかは実際のセンサー入力を見て判断するしかないのです。
それを可能にするのがシンプルモーションユニットRD77MSのバッファメモリを参照することであり、以降でお話する内容です。
サーボモータの安全を確保するために、オーバーラン(リミット)の情報がどのように取り込まれるのか確実に知っておきましょう。
広告
サーボアンプMR-J4Bシリーズの入力信号配線方法

Point.サーボアンプMR-J4Bのセンサー入力はCN3の端子番号2:前進オーバーラン(上限リミット)、端子番号12:後退オーバーラン(下限リミット)、端子番号15:原点ドグ(近点ドグ)
シンプルモーションユニットRD77MS サーボアンプMR-J4Bシリーズの入出力信号バッファメモリ

Point.バッファメモリ U0?¥G2416 +100nのbit0,1,6で確認可能
U0?:シンプルモーションユニットRD77MSのユニット番号
100n:nは軸No.でn = 軸No. -1となり、軸No.5なら5-1=4でn=4となる
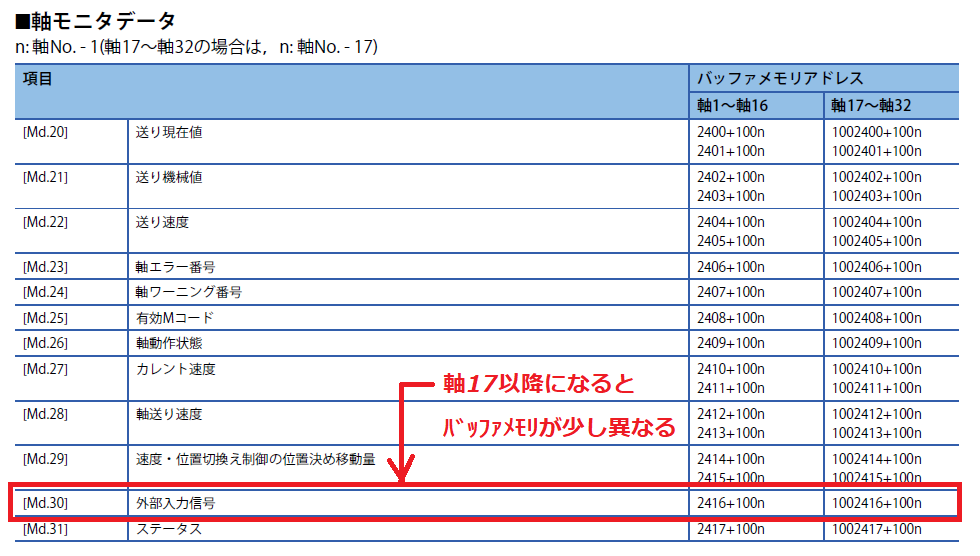
Point.軸No.17以降はバッファメモリの位置が変わるため注意する!
広告