
PLC(シーケンサ)はプログラムをラダー言語で記述されており、そのラダー1接点あたり数n秒で処理されています。
プログラムの演算が終わり、タッチパネルや各機器との通信が完了してトランジスタ出力を行う前の時間をスキャンタイムと言います。
演算が終わってからトランジスタ出力を行う前の時間のスキャンタイムはCPUのスペックにも依りますが、およそ5msec~50msecが多いかと思います。
サーボモータはサーボアンプからPMW( Pulse Width Modulation:パルス幅変調)の電圧を受け動いています。
そのPMW( Pulse Width Modulation:パルス幅変調)の制御周期はPLC(シーケンサ)のスキャンタイムで処理できるものではないため、サーボアンプによってサーボモータを制御しています。
サーボアンプとPLC(シーケンサ)を通信させるには、その演算周期に近いインテリジェントユニットというものを設置するのが一般的です。
iQ-Rシリーズですと、シンプルモーションユニットRD77MSというユニットを設置し、サーボアンプとPLC(シーケンサ)の通信を行うための架け橋になっています。
シンプルモーションユニットRD77MS MR-J4Bシリーズ入力信号のバッファメモリ参照
www.niwakafa.com
シンプルモーションユニットRD77MSは最大16軸制御可能であり、位置決め制御や速度制御、押し当て制御など様々な制御を行うことができます。
シンプルモーションユニットRD77MS 位置決め制御
www.niwakafa.com
シンプルモーションユニットQD77MS 押し当て制御
www.niwakafa.com
また、iQ-Rシリーズではサーボモータのシミュレーションも行うことができ、机上でデバッグし現場で調整のみを集中してできるようにもなりました。
シンプルモーションユニットRD77MS サーボシミュレーション
www.niwakafa.com
シンプルモーションユニットRD77MSには様々な機能があることを知ってもらったうえで、シンプルモーションユニットRD77MSからサーボアンプへ始動を行うためにはY1:全軸サーボONの信号を出力する必要があります。
下記画像はサーボの始動方法となります。
シンプルモーションユニットRD77MS サーボ始動方法

ここで問題となるのが、サーボ全てが動作できるようになってしまうということです。
装置内で一式サーボモータを使用している場合はこの全軸サーボON:Y1をON/OFFすれば、サーボモータをOFFすることができるのですが、ライン上でサーボモータをそれぞれ動作させていると、生産できなくなったラインは止めて片側だけ動かしたいという要望があります。
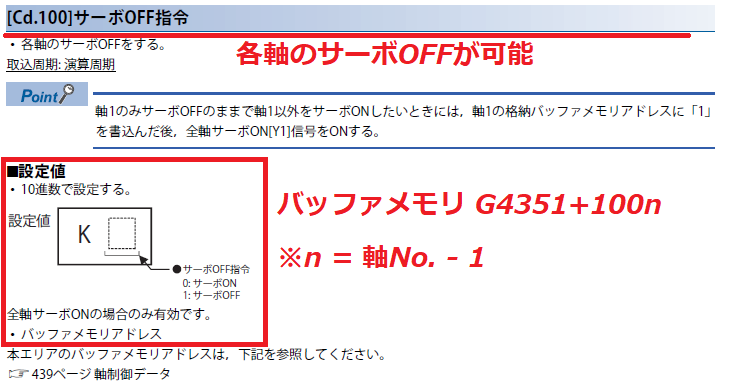
その要望に応えるのが各軸サーボOFF:U0¥G4351であり、この各軸サーボOFF:U0¥G4351にK1をMOV 16bit転送命令で送ることで各軸ごとにサーボモータをOFFすることが可能となります。
シンプルモーションユニットRD77MS 各軸サーボOFF U0¥G4351 + 100n
広告
シンプルモーションユニットRD77MS 各軸サーボOFF方法
先ほど説明した通り、各軸サーボOFF:U0¥G4351にK1をMOV 16bit転送命令で送ることで各軸ごとにサーボモータをOFFすることが可能となります。
シンプルモーションユニットRD77MS 各軸サーボOFF U0¥G4351 + 100n
ここで関係性を気にしなければならないのが、全軸サーボON:Y1です。
全軸サーボON:Y1は全てのサーボモータをONする命令であり、各軸サーボOFF:U0¥G4351はサーボモータをOFFする命令です。
全軸サーボON:Y1と各軸サーボOFF:U0¥G4351は相反するものですので、下記画像でその特性を把握する必要があります。
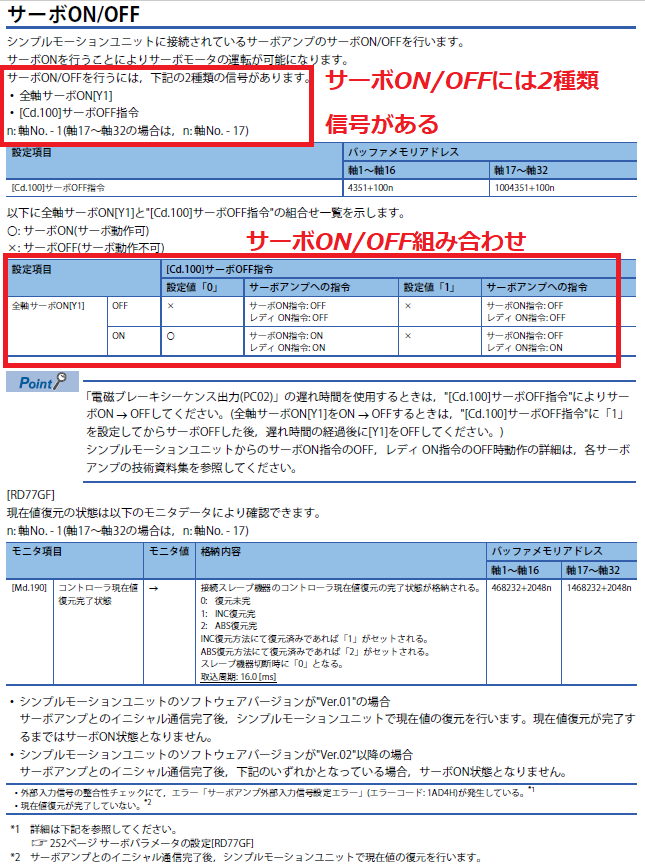
Point.全軸サーボON指令:Y1と各軸サーボOFF:U0¥G4351の信号はOFFが優先される
各軸サーボOFFを使用する際には、最初に説明した全軸サーボON指令:Y1の始動方法に加えて、下記の始動方法にも注意が必要となります。
シンプルモーションユニットRD77MS 各軸サーボOFF使用時の始動方法
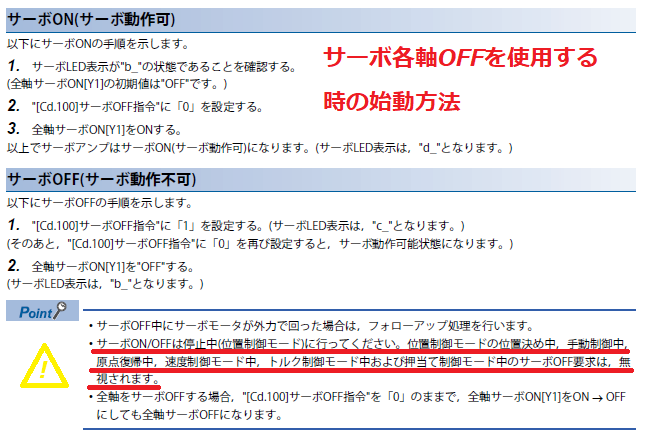
Point.各軸サーボOFF:U0¥G4351が優先されるため、始動時(異常がなければ)は0を書き込むようにする
注意として、各軸サーボOFF命令は位置決め制御中のみ有効のようです。速度制御や押し当て制御、JOG操作中は効かないようです。
私のプログラムは普段から、異常が発生した際に軸停止を行うようにしていましたので気にしておりませんが、おそらく軸停止信号を出力しないと、各軸サーボOFFが働かないようですので注意して下さい。
広告