
はじめに、補間制御について紹介すると、補間制御は多軸、X・Y軸と存在した場合に互いを一緒に動作させることを言い、X軸が500mm移動、Y軸が250mm移動となっても、X・Y軸が一緒に移動完了するような速度で動作させることができます。
SEL言語プログラムの最大の利点はこの補間制御ができるということであり、この強みを利用して様々な制御を行うことが可能となります。
今回はSEL言語プログラムで使用される軸補間制御PATH命令について紹介します。
www.niwakafa.com
www.niwakafa.com
広告
SEL言語解説 軸補間制御PATH命令
PATH命令解説
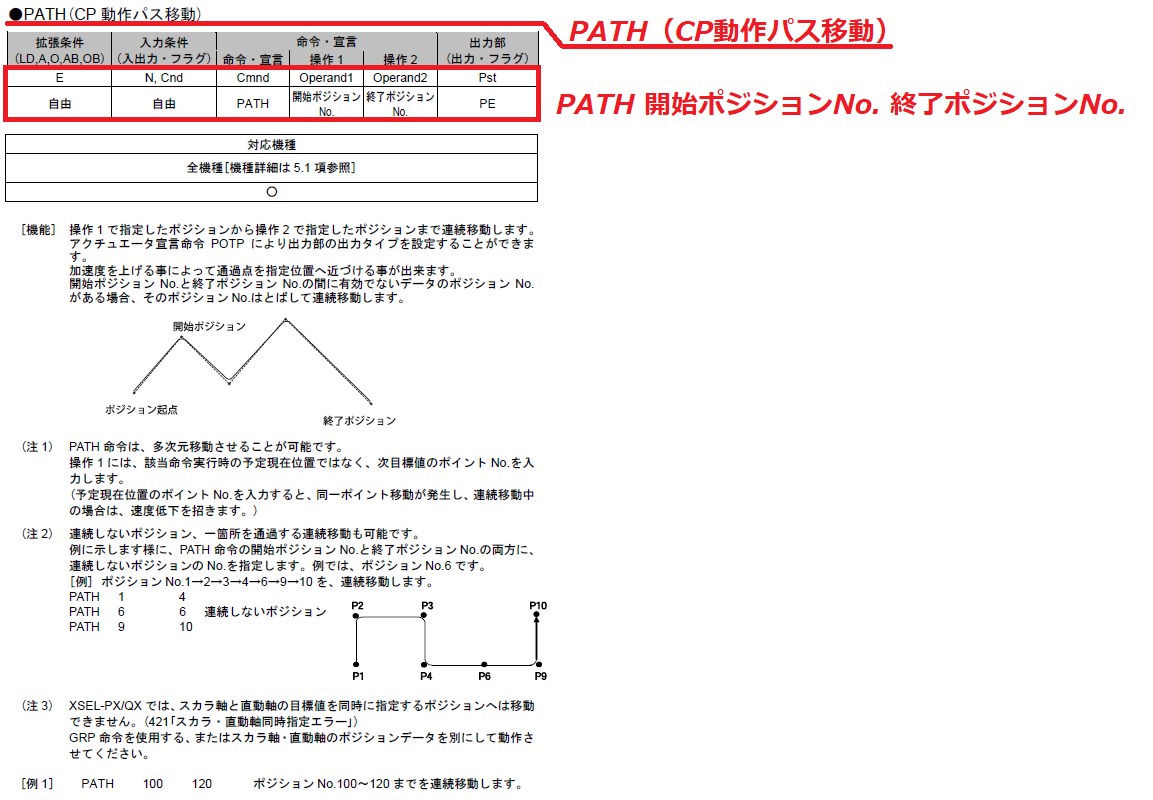
Point.PATH 開始ポジション 終了ポジションを指定
複数ポジション連続移動
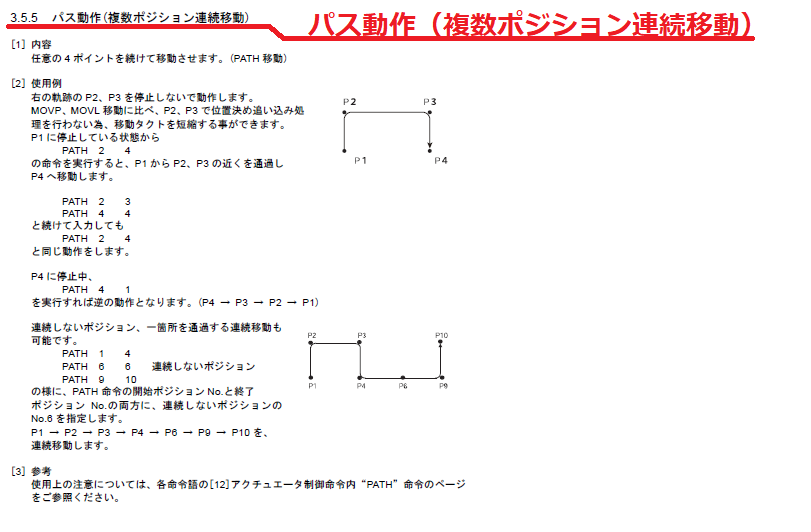
Point.開始ポジション→終了ポジションで複数ポジションを連続移動
PATH命令 外部信号出力方法
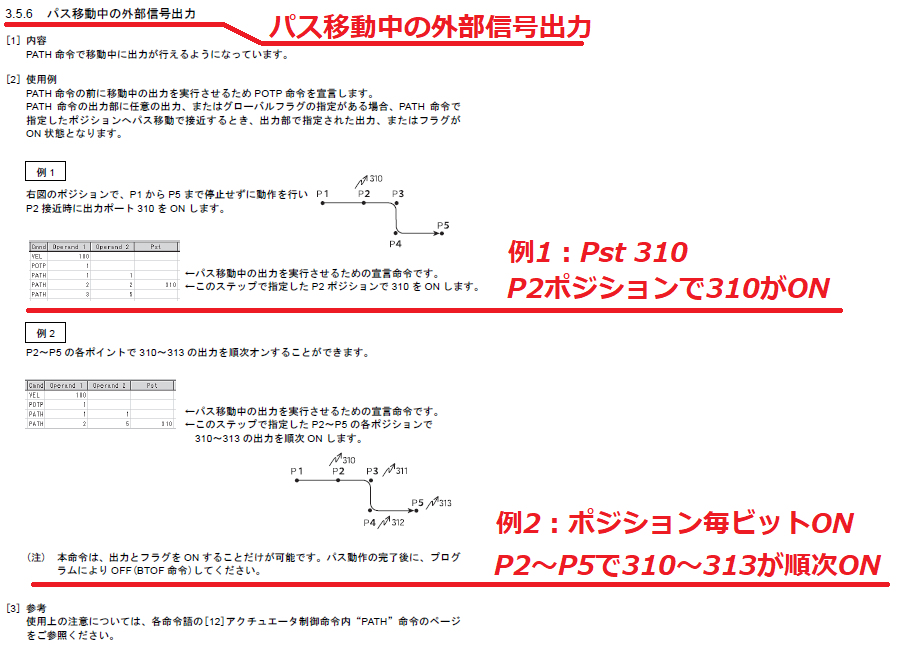
Point.Pstに外部信号出力を指定する
Pstに外部信号を出力するポートを決めれば、ポジションの近傍点付近でビット信号を出力します。
多点ポイントは連続でビットを占めますので、他プログラムと干渉がないことを確認する必要があります。
PATH命令 移動中速度変更方法
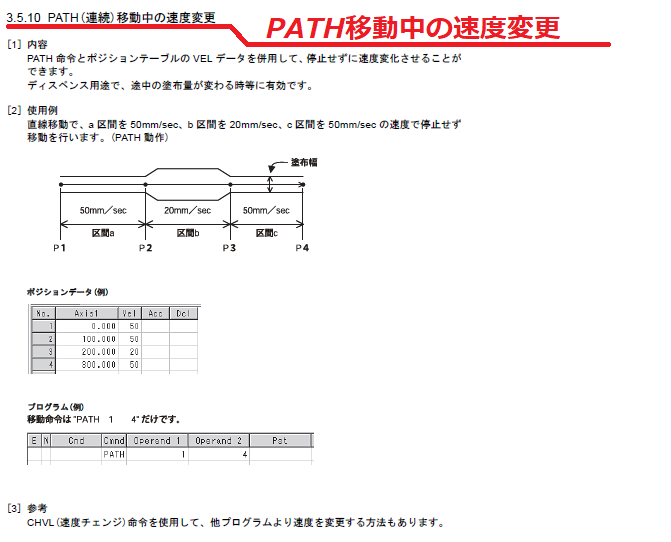
Point.必ず速度・加速度・減速度は指定する
速度や加減速度を指定しないと指示していないような速度や加減速度で動作してしまうので注意が必要です。
必ず速度や加減速度はポジションデータごとに指定するようにしましょう。
まとめ
・PATH命令で連続ポジション移動ができる
・外部信号出力は多点の場合連続ビットとなる
・ポジションデータごと速度・加減速度は指定する
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com