
MR-J4Bシリーズの三菱電機製サーボモータは原点位置をバッテリMR-BAT6V1SETで停電時エンコーダ部分に通電するようにしています。
MR-BAT6V1SETの電圧は約6V、エンコーダの電圧は3.4Vほどなのでサーボアンプ側で降圧して、エンコーダのパルスを拾えるようにしています。
一度発生したのですが、原点を設定し、現地へ搬入・復旧すると原点位置がずれていました。
再現性があったのが外力(人の力)でサーボモータを回すと原点位置がずれてしまうという現象でした。
その際に調べました内容として、今回はサーボモータMR-J4B停電時原点位置ずれを紹介します。
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
広告
サーボモータMR-J4Bシリーズ 停電時原点位置ずれ
MR-J4Bシリーズ バッテリMR-BAT6V1SET仕様
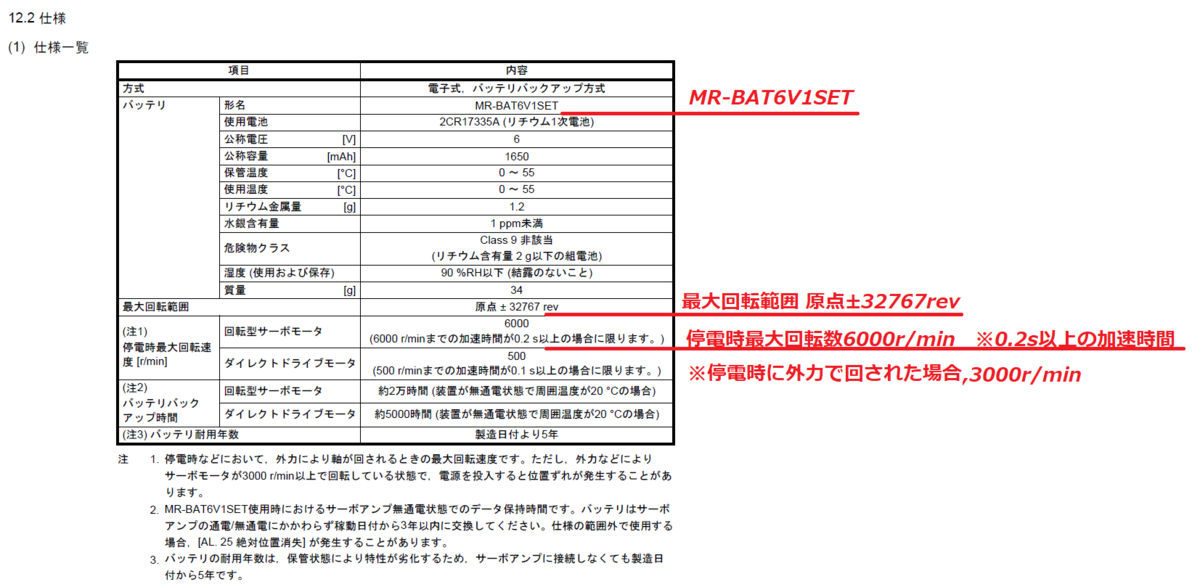
Point.バッテリで原点を覚えても外力などの回転速度3000r/minで原点がずれる
停電時のバッテリでカバーできる範囲は
①回転範囲 原点 ± 32767rev(回転)
②回転型サーボモータ 停電時最大回転速度6000r/min(1分間あたり6000回転)以下
③外力 回転速度3000r/min以下
この①~③が満たされている状態であり、どれかが満たされ無くなれば原点位置がずれる可能性があります。
当然完ぺきなシステムがあるわけではないので、簡単に人の手で回せそうな部分や原点の位置がずれてしまった場合などの参考として今回の内容を把握しておけば良いかと思います。
この知識を知っているのと知らないのとでは、お客様へ説明できなかったり、現象を再現できなかったりということになってしまいますので注意しましょう。
まとめ
・バッテリで原点を覚えても外力などの回転速度3000r/minで原点がずれる
・そのほか、回転範囲 原点 ± 32767rev(回転)以下、停電時最大回転速度6000r/min(1分間あたり6000回転)以下