
不二越(NACHI)の6軸ロボットを制御する機会がありましたので紹介していきたいと思います。

ロボットを制御するとなると、結構難しいと考える人が多いかと思います。
案外、ロボットをPLCから制御するのは簡単で、どこのメーカーも起動プログラムを最初に実行し、実行後はロボットプログラム作成者の意図に応じて、ビットをONしたりプログラムを起動したりという流れが多いです。
ロボット制御って、敷居が高いとか色々思われたりしますが、ロボットはサーボモータの塊に過ぎず、動きやプログラムなどはロボット屋さんが決めてくれるので、こちらはインターロックや原点復帰動作などを一生懸命考えてプログラムしてあげれば何の問題もないものです。
ロボットでカメラ処理やワークに物を被せたりなど複数の作業をさせるとなると、PLC側のプログラムも複雑になっていきますので非常に難しいですが。
今回はキーエンスKV-NanoシリーズEtherNet/IP通信6軸ロボット制御 不二越(NACHI) FD11について紹介します。
ロボット制御概要
ロボット制御フロー例
■ 初期プログラムを起動
■ ロボットプログラム作成者に応じてビットをONしたりプログラムを起動したりする
ロボットを数台しかやっていないので色々な方法がまだまだあるかと思いますが、私が経験した感じですと上記のようなフローでロボットは制御することが可能です。
不二越(NACHI) FD11 EtherNet/IP設定方法
チャンネル EtherNet/IP設定

※こちらの図ですと、マスター設定になっておりますが、PLCがマスターの場合はスレーブと設定して下さい。
EtherNet/IP 詳細設定

KV-Nano EtherNet/IP設定
KV-NC1EP

※KV-NanoシリーズでEtherNet/IPを使用するにはKV-NC1EPが必要です。
KV-NC1EP 不二越(NACHI)FD11 EtherNet/IP設定

※不二越(NACHI)のEtherNet/IP設定をするためには、専用のEDSファイルを追加する必要があります。
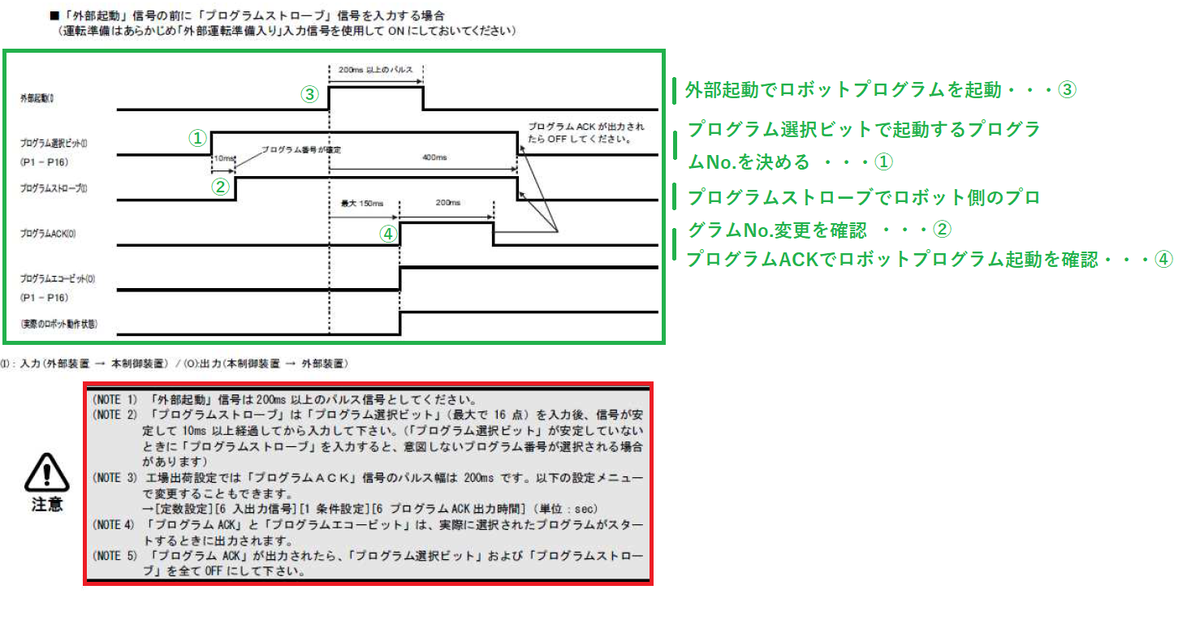
不二越(NACHI) FD11 ロボットプログラム起動
ロボットプログラム起動フロー詳細
まとめ
・ロボット制御の基礎はプログラム起動が全て・不二越(NACHI)のEtherNet/IP設定をするためには、専用のEDSファイルを追加する
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com