シリンダについて少し考えることがありましたので紹介したいと思います。
シリンダの動作というのは下記画像のように、シリンダ(電磁弁)へ信号を出してから数msec後にオートスイッチが抜けて、信号を出力した方向へシリンダが動きオートスイッチがONします。
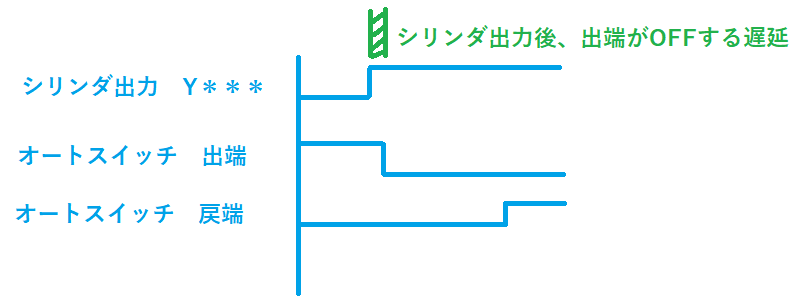
この数msec後にオートスイッチが抜けということが重要で、プログラム上でしっかりインターロックを作らないと同時にシリンダへの出力が入ってしまうということが起きてしまいます。
ちゃんとプログラムを作っていないからという問題もありますが、案外お客様のプログラムを見ても、センサーはしっかり見ているが、シリンダへの出力も含めた条件を見ていないということが多かったです。
このシリンダへの出力を含めた条件を見ないと、この数msec後にオートスイッチが抜けてという条件が足かせになり、同時にシリンダ出力が入ってしまい機械干渉することが起きてしまいます。
下記に参考例を用意しました。動作①~④を繰り返すような機構です。
ワークをシフトするような機構ですね。
機械構成 参考例

動作例① チャックが下降しワークを把持

動作例② チャックが上昇し走行が左端へ移動

動作例③ チャックが下降し把持したワークを外す

動作例④ チャックが上昇し走行が右端へ移動

今回はキーエンスKV STUDIOでシリンダインターロックプログラム例を紹介します。
プログラム構成例
プログラム構成例としては、下記のようにしていくと良いでしょう。
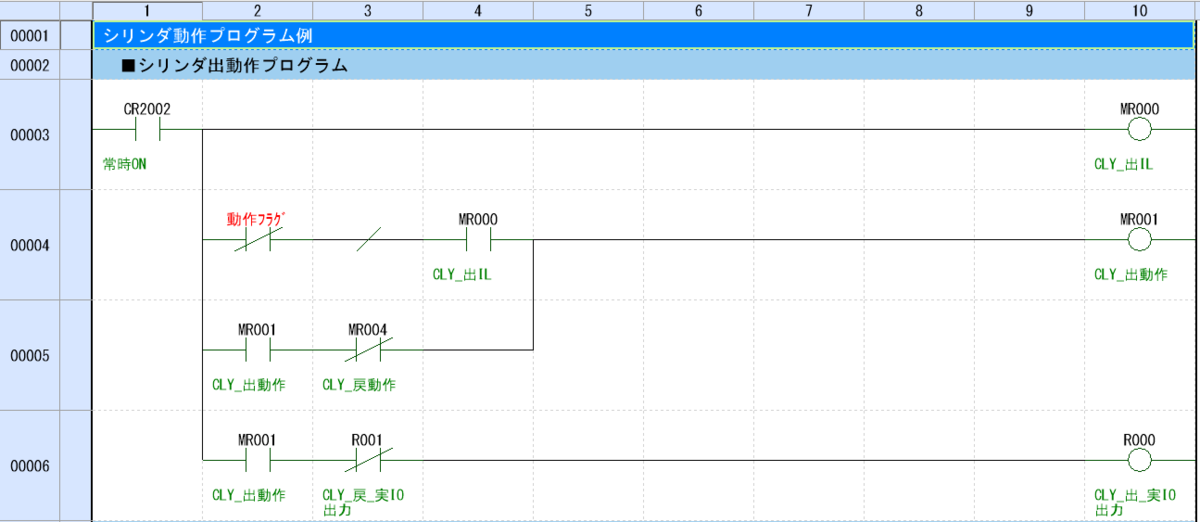
1.シリンダ出動作プログラム例
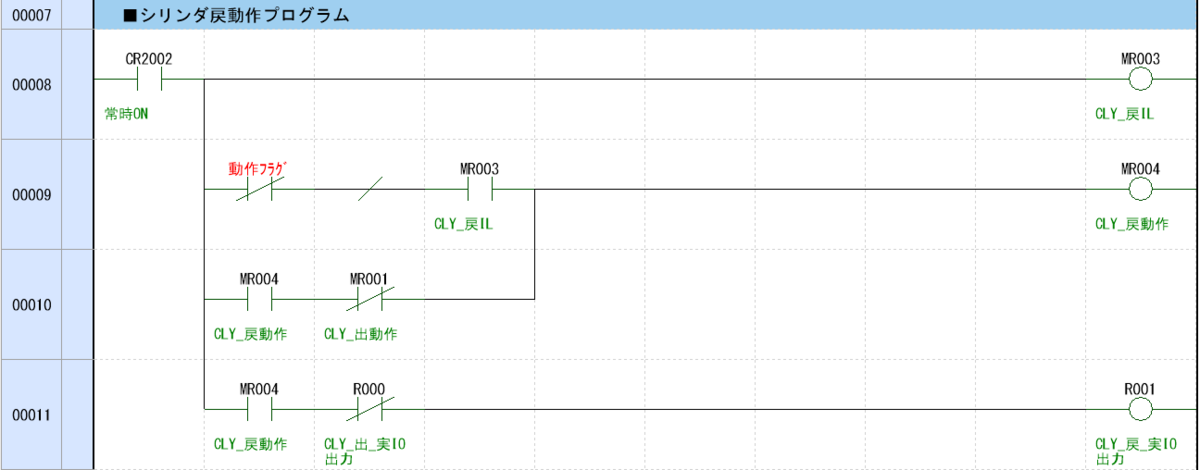
2.シリンダ戻動作プログラム例
3.シリンダ出/戻端確認プログラム例
シリンダ出動作プログラム例
シリンダ戻動作プログラム例
シリンダ出/戻端確認プログラム例

機器間:昇降/走行インターロック例

上記、シリンダ出/戻端確認プログラム例にある、MR002とMR005を次に動作する機器のインターロックとしてプログラムに入れることによって、センサー条件も見ることができ動作が入っても1スキャンで抜けることがないようにすることができます。
機械構成例に合わせたプログラム参考例
機械構成例
シミュレーション動作結果

チャック昇降 プログラム例
上昇プログラム例

下降/上昇・下降端プログラム例

チャック昇降 チャックプログラム例
チャックプログラム例

アンチャック/チャック・アンチャック端プログラム例

走行 プログラム例
走行左プログラム例

走行右/左・右端プログラム例

ワーク取出プログラム例
ワーク取出プログラムは動作例①~②を実行するものとなります。
動作例① チャックが下降しワークを把持
動作例② チャックが上昇し走行が左端へ移動
ワーク取出1サイクル動作

ワーク投入プログラム例
ワーク投入プログラムは動作例③~④を実行するものとなります。
動作例③ チャックが下降し把持したワークを外す
動作例④ チャックが上昇し走行が右端へ移動
ワーク投入1サイクル動作

まとめ
・シリンダインターロックは動作を含めて取る必要がある・オートスイッチだけの条件だと、1スキャンで同時に出力が入る可能性があるため注意
私の参考プログラムが欲しい方は下記メールアドレスへ連絡をお願い致します。
v_6ong_3ka_cpアットマークyahoo.co.jp
※アットマークを@に変更して下さい。
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com
www.niwakafa.com