搬送メーカーはだいたいインダクションモーターなので、サーボやロボシリンダのような設定するような機器の使用頻度が少ないです。
ですので、一度機器を立ち上げたら忘れることが多いです。
再び使用することがあると、また調べ直すのが面倒だと思ったので、記事にしたいと思います。
今回はロボシリンダ(IAI)のCC-Linkによるフル直値での制御を主に扱います。

引用:IAI
【目次】
広告
はじめに
エアー環境がない工場やエアーシリンダで搬送能力が足りないなどの理由により、ロボシリンダを使用します。
参考ですが、エアーシリンダの速度は200~300mm/secに対し、ロボシリンダは400~500mm/secほど速度を出すことが出来ます。
※メーカーや型式などにより異なりますので、参考として下さい。
制御方法
制御方法は、IOやハーフ、フル直値など様々あります。CC-Linkを使用するならハーフかフル直値がおすすめです。
それぞれで占有局数が異なり、CC-Linkマスターユニットの制御局数が決まっていますので、必ず計算してください。(ハーフ2局、フル4局)

引用:IAI
上記画像が占有局数の参考です。
下記に動作モードの参考を示します。
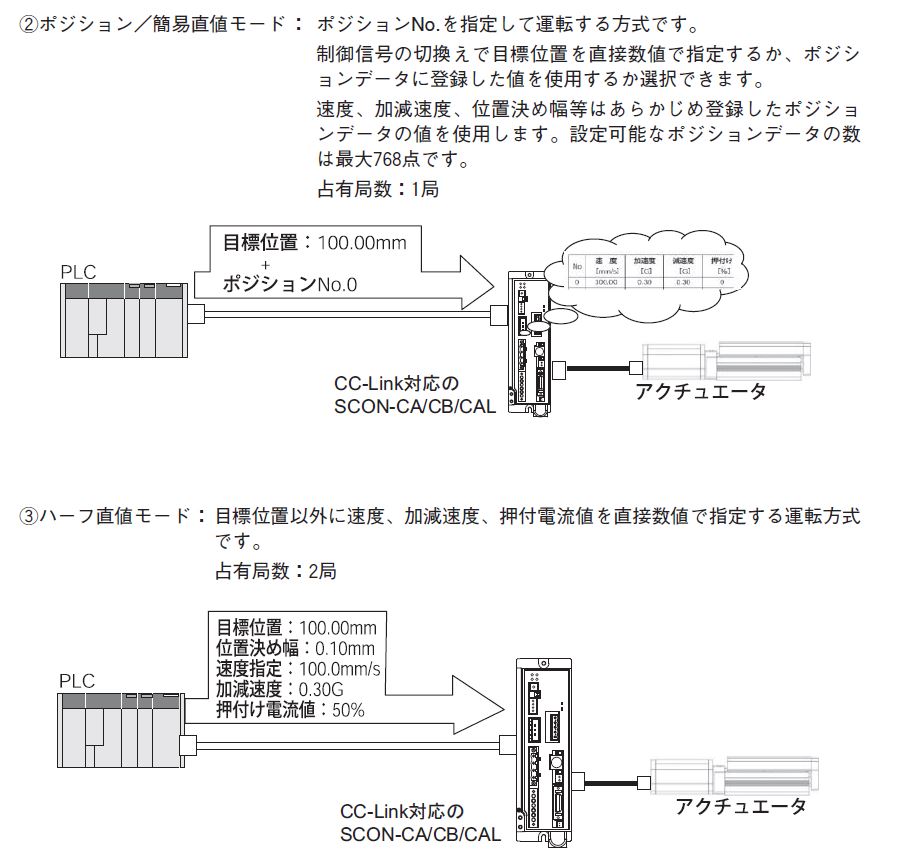
引用:IAI

引用:IAI
広告
入出力デバイス詳細

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI
送受信信号遅れ

引用:IAI
CC-Linkは必ず信号の送受信遅れが生じます。下記で説明しますが、ボーレートというものがあり、kbpsで表記されています。
通信速度はSSCNETⅢ/Hが150Mbpsに対して、CC-Linkが最大10Mbpsと15倍も遅いのです。
SSCNETⅢ/Hの通信周期が最大0.88msecということなので、0.88msec × 15 = 13.2msec掛かってしまいます。
PLCの設定にもよりますが、13.2msecあれば数スキャン信号にタイムラグを設けなければ、PLCとIAIの通信が正常に行うことが出来ないことがわかります。
広告
運転方法

引用:IAI

引用:IAI

引用:IAI
基本設定
局番設定

引用:IAI
ボーレート

引用:IAI
ロボシリンダ設定
パネル面

引用:IAI

引用:IAI
PC接続でのパラメータ変更一覧

引用:IAI

引用:IAI

引用:IAI
パラメータ一覧

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI

引用:IAI
アブソリュートバッテリ
リセット

引用:IAI
広告

引用:IAI
GX Works2
CC-Link設定

引用:IAI

引用:IAI

引用:IAI
終わりに
メモ書き程度ですので、また後日追記していきます。
広告