ーーーーーーーーーーーーーーーーーーーーーーーーーーー
FA電気設計屋の技術倉庫は、下記、スポンサーの提供で記事を作成しております。
■ つよぽん@制御設計 https://x.com/kubisu_taka21
■ ドラフター|東大阪機械制御 https://x.com/drafter_san
東大阪機械制御 | 関西で制御設計を任せるなら東大阪機械制御
■ 箱入り https://x.com/hakomussu
https://hakoden.jp/
ーーーーーーーーーーーーーーーーーーーーーーーーーーー
前回、キーエンスKV-HX04ML MECHATROLINK-ⅢのIAI通信設定方法を紹介しました。
通信設定のみですと、運転ができないです。
おそらくですが、MECHATROLINK-Ⅲで通信している場合、IAIは毎回原点復帰が必要になるはずです。
位置決め運転を行うにしろなんにせよ、原点復帰しないと話にならないのが軸制御です。
今回は、キーエンスKV-XH04ML MECHATROLINK-ⅢのIAI原点復帰プログラム設計方法について紹介します。
IAIの原点復帰方法
キーエンスから出ております、資料を抜粋しております。
動作許可とサーボON
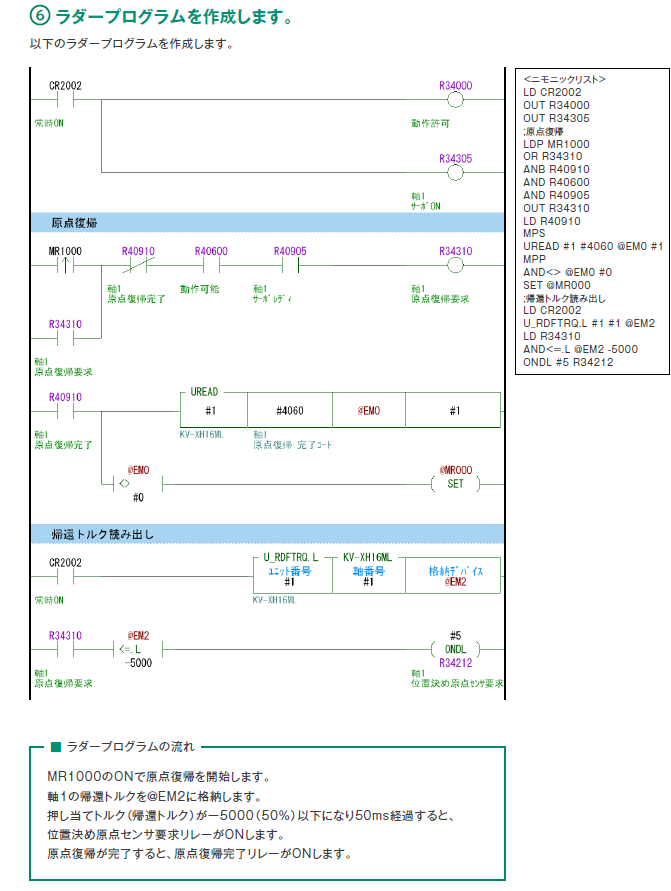
R34000はKV-XH04MLを動かすための動作許可になります。
※割り当てたIOによって異なります。
R34305はIAIを動かすためのサーボをONします。
※割り当てたIOまた、軸No.によって異なります。
原点復帰要求と復帰完了
R34310で原点復帰が開始します。
R40910で原点復帰完了となります。
@EM0に完了コードが格納されるようになっております。
帰還トルク
IAIの原点復帰は押し当てですが、それは、MECHATROLINK-Ⅲ以外で制御するときに可能です。
MECHATROLINK-Ⅲで制御する場合、自分で帰還トルクを判定し、位置決め原点センサ要求をONする必要があります。
帰還トルクの値は、正直やってみないとわかりませんが、-30~50%程度が適正ではないでしょうか。
ここは、微調整が必要になるかと思います。
原点復帰方向

原点復帰方向が逆の場合、原点復帰方向を反転してください。
ただし、回転方向との兼ね合いがありますので、注意が必要です。
まとめ
・MECHATROLINK-Ⅲでは原点復帰を手動で調整する必要があります。・位置決め制御を行う、位置をモニタするなど、原点復帰しないと正常に制御できないため、原点復帰は必要不可欠です。